
 158-1753-1008
158-1753-1008
158-1753-1008
158-1753-1008
行业资讯
在精密制造领域,张力控制的精准度直接决定产品品质。以光纤绕包为例,若张力波动超过±0.5%,可能导致断纤或应力不均,良率骤降。某光纤厂商引入巧之力科技的伺服张力器后,张力波动从±2%缩小至±0.3%,良率从92%提升至99.8%。其核心工作原理在于:伺服电机驱动张力辊,高分辨率编码器实时采集张力值,经PID闭环算法瞬时调整电机输出扭矩,实现毫牛级精准控制。整个过程响应时间小于5毫秒,远超传统机械摩擦式张力器。
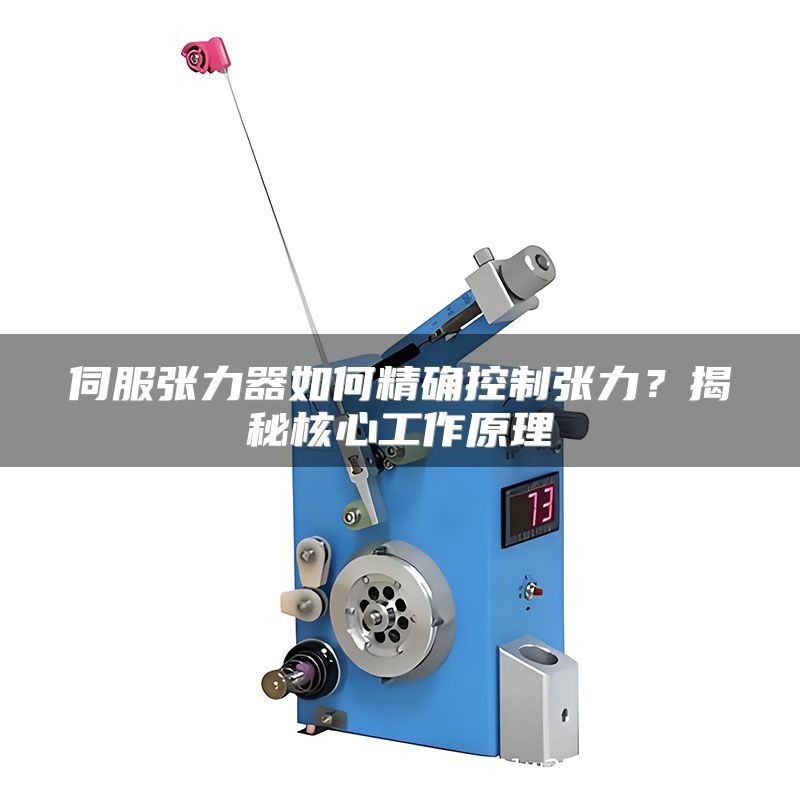
伺服张力器由伺服电机、张力检测传感器、驱动器及控制器构成。张力传感器(通常为应变片式或压电式)将物理张力转换为电压信号,精度可达±0.1%。编码器每圈输出高达131072个脉冲,确保位置与速度的精细反馈。
实操建议:安装时务必确保传感器轴线与材料行进方向垂直,偏差超过5度将导致测量误差增大。建议每季度用标准砝码校准传感器,避免温漂影响。本人曾处理过某线缆厂案例,因传感器紧固螺栓松动导致反馈信号波动,重新紧固后张力波动从±1.2%降至±0.4%。
控制器内置的PID算法是伺服张力器的“大脑”。比例系数P决定响应速度,积分系数I消除稳态误差,微分系数D抑制超调。以0.1N目标张力为例,当实际张力偏离目标值时,算法计算差值并调整电机电流,使扭矩输出在3毫秒内完成修正。实际应用中发现,若牵引速度突变(如急停),普通PID可能产生20%的过冲,而采用自适应PID的伺服张力器可将过冲控制在3%以内。
实操建议:客户工厂首次调试时,建议采用“先P后I再加D”的逐步整定法。先设置I=0,D=0,从低P值(如0.5)开始,逐步增加直至出现轻微振荡,再将P回调80%;然后缓慢增加I值消除静差;最后加入D值抑制超调。某电池极片涂布项目采用该方法,仅用两小时即完成参数优化。
值得注意的是,部分用户误认为PID参数一旦设定即可永久使用。实际上,随着材料摩擦系数、环境温度的变化,最佳参数会漂移。建议每更换一批材料或季节更替时,重新审视PID参数,必要时启动自整定功能。
伺服张力器已广泛应用于光纤二次被覆、线缆束绞、锂电隔膜涂布、纺织经纱等场景。以锂电隔膜为例,其厚度仅7μm,张力控制需稳定在0.05N以内,否则易产生褶皱或拉伸变形。巧之力科技的伺服张力器在150米/分钟高速运行下,张力波动仍可锁定在±0.02N,良率达99.5%以上。
实操建议:不同材料对张力波动敏感度差异大。建议针对每种材料建立“张力-速度”工艺曲线数据库,通过实验确定最优目标值。例如,0.5mm铜线的最佳张拉力为8~10N,而0.1mm金线仅需0.2~0.3N。使用时需根据线径、材料屈服强度快速切换参数。另外,辊筒表面粗糙度影响摩擦力,建议对高光洁度材料(如金属箔)使用橡胶涂层辊,避免打滑。
在维护方面,应定期清理编码器与传感器表面的油污,防止信号失真。我见过某软包电池极片产线,因车间粉尘附着在张力辊上,导致反馈数据异常,停机清洁后恢复正常。此外,伺服驱动器温度超过60℃会触发降频保护,建议在通风环境安装,并预留散热空间。
无论是精密电子线缆还是高价值的光纤,张力控制都堪称“隐形的品质卫士”。伺服张力器通过毫秒级的闭环调节,将制造不确定性降至最低,这正是现代工业从“能做”迈向“做好”的核心保障。选择可靠品牌(如巧之力科技),配合科学的调试与维护,你便掌握了精密制造的“定盘星”。



